Mohonky
Member
[Image: Banner]
Why a Multirotor OT?
Multirotors have been gaining an ever increasing presence in the past few years both within the RC community and outside from those with a casual interest right up to professional photographers and film makers. But there exists a huge range of multirotors, frames, components and accessories that can make getting into this segment of RC, either as a hobbyist or a professional; rather overwhelming.
As such, in this thread we're going to start from the very basics of choosing the correct multirotor and it's components to help users get the most out of their airframe for the type of flying they'll be doing, advice and tips on learning to fly as well as covering numerous other aspects of multirotor ownership.
It is important to note, that while I myself own a few frames and have experience flying both Line of Sight and FPV, I'm not a one man encyclopaedia and I don't have an answer for every question, particularly as this is a relatively new segment of the RC community and is experiencing exponential growth due to the opensource nature of the software that allows for ever increasingly complex levels of automation and flight characteristics. Because of this, we'll all be learning something a long the way and in doing so we may need to look to other sources of documentation for more specific questions regarding flight controllers and software. We'll all be able to contribute here either with our own knowledge or by providing links to other resources for those needing more in depth knowledge on some specifics.
So having said that, a quick look into the history of the multirotor to help understand what a multirotor is and why there has been such tremendous growth in this segment of RC.
[Image: Multirotor]
What is a Multirotor?
A multirotor is, as the name suggests, an airframe that achieves flight through the use of multiple motors. We've had airframes that could fly before though, so why the big deal with multirotors vs Helicopters or Planes and more so, if the multirotor has any benefit over those other forms of aircraft, why only now are we seeing the growth in popularity of the multirotor?
Both can be answered by coming back to the fundamental flight characteristics of the multirotor. Put simply, it was a software problem.
While the idea of having multiple rotors to suspend an airframe in the air seems like it would inherently be more stable than the single rotor of a helicopter it's actually not. In order to maintain level flight a multirotor must constantly adjust power output to each of its rotors to maintain stability. To then actually pitch, roll or yaw; requirements to make the multirotor move through the air and maintain stability an even bigger problem.
Helicopters are able to overcome this by use of a mechanical linkage known as a swashplate. A swashplate is a mechnical device that is able to change the pitch of the blades as they rotate; by altering the angle of the swashplate a pilot can alter the pitch of the blades of the helicopter and in turn achieve lift, pitch and roll. The addition of the tail rotor is able to counter any rotational torque applied to the helicopters airframe and enable it to yaw when required.
Multirotors do not have any such mechanical linkage. That's not to say it's impossible, but this means a swashplate per rotor all needing to be controlled by the pilots input. Essentially, it's just too complicated to be practical.
Hardware and software has come a long way and the introduction of the ESC (electronic speed controller) in combination with the necessary PCB (namely, the Arduino board) containing the software (the electronic brain required to control each ESC individually) we are able to achieve stable flight with the multirotor, and yet not only that, but at prices attainable for mass market consumption.
This is of course at it's most basic level. Looking into the current state of multirotor flght controllers, even in the short time that multirotors have been on the mass market, the opensource nature of the software found in many flight controllers has mean't that the collective pool of clever dicks out in the wild has managed to refine and expand upon the multirotors capabilities. The multirotor isn't just an airframe that achieves very stable flight, but one that is capable of so much more; particularly in terms of autonomy and for the budding photographer or videographer, the ability to get photo's and video that would normally require one to be in a helicopter / plane or in some instances, simply not possible at all.
Which Multirotor for me?
We'll discuss not what frame to start with, but what our ultimate goal is and the pro's and con's of each frame.
There are a number of multirotor configurations that lend themselves better to some tasks rather than others and so it's important to understand what you ultimately plan on doing with your multirotor. These are the most common multirotor configurations and all lend themselves to slightly different characteristics in terms of flight and lifting capability. Once you have decided on what sort of use your multirotor will serve, it's time to pick the appropriate multirotor layout.
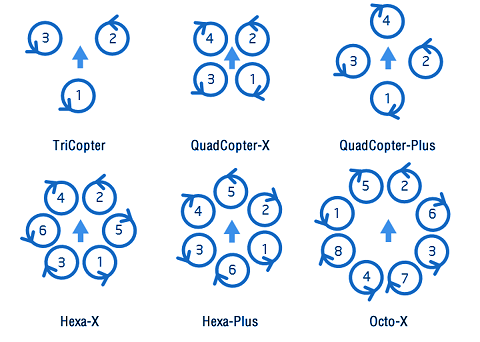
Tricopter: this layout fits an unusual position in the multirotor realm. It is the only one where a servo maybe used to 'tilt' the driving rotors. This enables the frame to perform Yaw movement with more responsiveness and speed, not as quick as a helicopters tail rotor, but definitely more substantial than you're typical multirotor. With only 3 rotors, this frame has the least lighting capacity so is likely not the frame you really want to use if you plan on attaching your GoPro or other recording devices. However these can still comfortable be fitted with FPV (first person view) gear.
The extra Yaw capability makes this a great multirotor for sports flyers wanting to perform more acrobatic manuevers.
Quadcopter: this is the frame most of us will be familiar with. Utilising 4 rotors, this particular airframe is a very good jack of all trades. More stable and with greater lifting capability than the Tripcopter, a Quadcopter makes a great middle ground for those wanting something with the capability of flying acrobatically as well as doing moderate lifting duties carrying devices like the GoPro as well as fitment of gimbals etc. While you can get larger quad layout airframes, you may find adding extra flight sensors, controllers and other accessories at times a tight fit.
This is also the frame most commonly used in 'FPV Racers,' smaller airframes with higher RPM motors capable of serious speeds and acrobatic ability to perform rolls and flips.
A good all rounder.
Hexacopter: this is the beginning of the 'heavy lifters.' The Hexacopter is the choice for heavy lifters who don't want to move to the Octocopter. If you're ultimate goal is to mount a camera, whether a smaller point and shoot or reasonably sized DLSR, this is the minimum you want go as the increased lifting capability and general stability of these frames will be highly desired.. With 6 rotors for increased lighting capability and generally larger prop size and ability to fit larger motors and more powerful ESC's to match, anyone with aspirations of serious photography / video filming should consider this as a minimum. These are usually larger frames so fitting extra sensors and accesssories (Gimbals, IR controllers for operating your camera in the air etc) shouldn't be too much of an issue and you should have enough room on the airframe to keep your install relatively clean and uncluttered.
It is also worth noting that the loss of one of the rotors either by ESC or Motor failure may not necessarily lead to a catastrophic loss of control to this configuration of airframe. Flight may still be possible, a loss of Yaw control maybe noticeable but getting a safe return of the airframe may still be possible.
*While most FPV racers are Quadcopters, there are a few small Hexacopters used in FPV racing also. Because 100+ km/h just isn't enough for some people.
Octocopter: basically all the pros and cons of the Hexa, the Octo is the choice for serious photography and video needs; it is easily able to carry larger payloads with great stability, the Octocopter is the choice of Professionals and Enthusiasts alike. This is not the frame for those looking for acrobatic or sports flying, it is purely a work horse.
Like the Hexa, it can also maintain stable flight even in the event of a rotor failing, in many cases 2 or more so it offers some safety for those hauling expensive equipment.
So, having picked the best frame for our intended use, it's time to pick probably the most vital component of our multirotor......
Flight Controllers
Like choosing your choice of multirotor airframe, your intended use of your multirotor can influence which flight controller you choose. The basic functionality of the flight controller does not change from one unit to the other, their primary function is to control the speed or each rotor, keeping the airframe in the air and stable. What does change is the feature set of each controller. While the majority of controllers offer some level of autonomy to near full autonomy through the integration of optional sensors, some of these flight controllers handle autonomous flying better than others while other flight controllers provide smoother and more responsive inputs making them excellent for acrobatic and sports flying where the pilot is seeking the thrill of the flying rather than taking a backseat and letting the flight controller take the wheel.
The Arduino board and Opensource software are two of the factors that have allowed for the exponential growth in the multirotor sector and there is a collective effort out there to constantly update and expand upon the multirotor source code. For coders and programmers, this open nature won't be too unfamiliar or complicated to pick up, for the regular user, this can be bit of a dive into the deep end; but don't fret, there is plenty of documentation out there and so long as you don't go making ill advised changes to the flight sketches and stick to the tried and tested ones, there shouldn't be any need for you to get involved here, just stick with what is known to work and update when the later updates are released and known to be as reliable as possible.
Most of the boards you encounter will be Arduino and Opensource based with few exceptions. How well they perform varies from one flight controller to the next.
This is not all of the flight controllers, but some of the more popular.
DJI
http://www.dji.com/

Even if you don't know who DJI are, you probably know their most popular mainstream product, the Phantom. DJI are the biggest commercial name in the multirotor business, if everyone else is Android, DJI are the industries Apple. Whether it's their mainstream line of Phantoms, their individual flight controller line Naza or their larger commercial line of Ace or Wookong systems, DJI position themselves as a company with a solid, simply to use flight ecosystem for the beginner to the professional.
For those after the simplest plug and play system straight out of the box with room for expansion and are interested more in the opportunities multirotors can afford them in aerial videos and photography, this maybe flight controller to consider for your multirotor frame.
This is commercial hardware and software designed for ease of use. If you have limited computer knowledge or are looking for a flight controller backed by a big manufacturer with warranty, this might the one to go with.
Arducopter
http://www.arducopter.co.uk/

Like the rest of the boards in this line up, Arducopter is opensource. Arducopter has a very powerful suite of features for automated flight and of the opensource flight controllers, it arguably has the most accurate and reliable automated features, rivalling that of DJI at a considerably lower price point. Ths software is also relatively easy to setup and use with a clean and easy to navigate GUI.
Flight Modes
-Acro: Full Manual
-Stabilise: On release of cyclic input, airframe will return to level flight (will still drift)
-Alt Hold: Airframe will maintain altitude.
-Loiter: Basically skyparking. Airframe will maintain position and altitude.
-Drift: Fly airframe with aeroplane characteristics
-Circle: Airframe circles a point of interest maintaining a focus on center of point of interest.
-Brake: After releasing cyclic stick input, airframe will come to a stop and stabilise in position where input was released (essentially enables Loiter after stick input)
-Follow Me: Does what it says. It will follow
-Return to Landing: Airframe will return to point of take off.
-Sport Mode: Will maintain Altitude and a fixed roll, pitch or yaw angle. Basically for panning shots.
-Guided: Airframe is instructed by commands via laptop / tablet and interactive software
-Auto: After selecting waypoints, the airframe will navigate along a path to each point. Certain tasks maybe incorporated into this mode like taking pictures, gimbal direction, loiter, point in specific direction etc.
*Some flight modes may require additional sensors or other hardware
CC3D

CC3D has largely disappeared now despite the fact the hardware still exists and is being manufactured the original OpenPilot software is becoming less common as pilot move over to Librepilot. Librepilot contains many of the original founding members of the Openpilot software source and is still being developed today.
Flight Modes
-Rate Mode / Acro: full manual
-Angle: Will not allow the airframe to exceed set angle. ie. Airframe cannot become inverted, will reach maximum angle and not allow it to exceed that.
-Horizon: A mix of Angle and Acro. Smaller inputs will maintain Angle mode, larger inputs will allow the airframe to perform as if in Acro mode, however when reverting back to smaller inputs or releasing cyclic, airframe will self level.
Position Hold and Return to Home are possible with some modification and additional hardware.
Naze32

Probably the most common board on the market today for FPV pilots and racers; designed to be an Acro board that did away with unnecessary features and bloated software code to give pilots the fastest, most precise flight input possible. This pursuit has led to a variety of hardware and software configurations that have been updated and redesigned at a staggering rate.
For the purpose of this description I won't be going into depth on the individual boards (of which there are many) available nor the many offshoots of software these are designed to run.
MultiWii

Interestingly, MultiWii is so named because the original iterations used the gyro and acccelerometer from the Wii-Mote and Nunchuk. Yeop, Nintendo actually inadvertently provided hardware for multirotors.
MultiWii is one of the oldest flight controllers around. Naturally both the hardware and software has undergone multiple iterations. Currently, MultiWii is a good choice for users wanting to fly full acro (manual) or automated as it features a suite of automated modes found in Arducopter and DJI systems. It should be noted though, that while this board and software is capable of many automated flight modes, these shouldn't really be relied upon in the same way as Arducopter or the DJI series of flight controllers.
Modes like GPS Hold where an airframe should remain stable in the air and 'hold' it's current position and altitude is not as stable or accurate as that found in other software and you may find the airframe drifting around or rising and dropping. Arducopter and DJI excel in these areas with excellent position holding capability.
In saying that, it's not that the mode doesn't function, it's that if such a mode is important to you, you may want to consider other boards as these modes are better executed there.. Otherwise, automated flight is capable on these boards and the source code allows a lot of flexibility between manual and auto flight modes making it an excellent all rounder.
Boards like the Paris v5r3 is also an excellent board as where other boards require you to 'add on' extra components like FPV OSD (first person view on screen display), voltage meters for OSD and other features, all of this is already ready to go on these boards.
Flight Modes
-Rate Mode / Acro: full manual
-Angle: Will not allow the airframe to exceed set angle. ie. Airframe cannot become inverted, will reach maximum angle and not allow it to exceed that.
-Horizon: A mix of Angle and Acro. Smaller inputs will maintain Angle mode, larger inputs will allow the airframe to perform as if in Acro mode, however when reverting back to smaller inputs or releasing cyclic, airframe will self level.
-Baro: Maintain altitude, can be adjusted with throttle to increase or decrease set altitude
-Mag: Maintain current yaw. ie. Nose will stay locked in one direction
-HeadFree: Changes the control of the airframe such that even if the airframe is pointing toward you, pushing up on cyclic will always move the airframe away from you, pushing left will always move it left. ie. You will not need to compensate for airframes current heading.
-HeadAdj: disables and resets current Headfree state in the event you have moved or changed direction and need to reset HeadFree position
-GPS Hold: Locks airframe into current position
-GPS Home: Returns airframe to take off position (does not land for you, only returns to point of take off
*Some flight modes may require additional sensors or other hardware
Why a Multirotor OT?
Multirotors have been gaining an ever increasing presence in the past few years both within the RC community and outside from those with a casual interest right up to professional photographers and film makers. But there exists a huge range of multirotors, frames, components and accessories that can make getting into this segment of RC, either as a hobbyist or a professional; rather overwhelming.
As such, in this thread we're going to start from the very basics of choosing the correct multirotor and it's components to help users get the most out of their airframe for the type of flying they'll be doing, advice and tips on learning to fly as well as covering numerous other aspects of multirotor ownership.
It is important to note, that while I myself own a few frames and have experience flying both Line of Sight and FPV, I'm not a one man encyclopaedia and I don't have an answer for every question, particularly as this is a relatively new segment of the RC community and is experiencing exponential growth due to the opensource nature of the software that allows for ever increasingly complex levels of automation and flight characteristics. Because of this, we'll all be learning something a long the way and in doing so we may need to look to other sources of documentation for more specific questions regarding flight controllers and software. We'll all be able to contribute here either with our own knowledge or by providing links to other resources for those needing more in depth knowledge on some specifics.
So having said that, a quick look into the history of the multirotor to help understand what a multirotor is and why there has been such tremendous growth in this segment of RC.
[Image: Multirotor]
What is a Multirotor?
A multirotor is, as the name suggests, an airframe that achieves flight through the use of multiple motors. We've had airframes that could fly before though, so why the big deal with multirotors vs Helicopters or Planes and more so, if the multirotor has any benefit over those other forms of aircraft, why only now are we seeing the growth in popularity of the multirotor?
Both can be answered by coming back to the fundamental flight characteristics of the multirotor. Put simply, it was a software problem.
While the idea of having multiple rotors to suspend an airframe in the air seems like it would inherently be more stable than the single rotor of a helicopter it's actually not. In order to maintain level flight a multirotor must constantly adjust power output to each of its rotors to maintain stability. To then actually pitch, roll or yaw; requirements to make the multirotor move through the air and maintain stability an even bigger problem.
Helicopters are able to overcome this by use of a mechanical linkage known as a swashplate. A swashplate is a mechnical device that is able to change the pitch of the blades as they rotate; by altering the angle of the swashplate a pilot can alter the pitch of the blades of the helicopter and in turn achieve lift, pitch and roll. The addition of the tail rotor is able to counter any rotational torque applied to the helicopters airframe and enable it to yaw when required.
Multirotors do not have any such mechanical linkage. That's not to say it's impossible, but this means a swashplate per rotor all needing to be controlled by the pilots input. Essentially, it's just too complicated to be practical.
Hardware and software has come a long way and the introduction of the ESC (electronic speed controller) in combination with the necessary PCB (namely, the Arduino board) containing the software (the electronic brain required to control each ESC individually) we are able to achieve stable flight with the multirotor, and yet not only that, but at prices attainable for mass market consumption.
This is of course at it's most basic level. Looking into the current state of multirotor flght controllers, even in the short time that multirotors have been on the mass market, the opensource nature of the software found in many flight controllers has mean't that the collective pool of clever dicks out in the wild has managed to refine and expand upon the multirotors capabilities. The multirotor isn't just an airframe that achieves very stable flight, but one that is capable of so much more; particularly in terms of autonomy and for the budding photographer or videographer, the ability to get photo's and video that would normally require one to be in a helicopter / plane or in some instances, simply not possible at all.
Which Multirotor for me?
We'll discuss not what frame to start with, but what our ultimate goal is and the pro's and con's of each frame.
There are a number of multirotor configurations that lend themselves better to some tasks rather than others and so it's important to understand what you ultimately plan on doing with your multirotor. These are the most common multirotor configurations and all lend themselves to slightly different characteristics in terms of flight and lifting capability. Once you have decided on what sort of use your multirotor will serve, it's time to pick the appropriate multirotor layout.
Tricopter: this layout fits an unusual position in the multirotor realm. It is the only one where a servo maybe used to 'tilt' the driving rotors. This enables the frame to perform Yaw movement with more responsiveness and speed, not as quick as a helicopters tail rotor, but definitely more substantial than you're typical multirotor. With only 3 rotors, this frame has the least lighting capacity so is likely not the frame you really want to use if you plan on attaching your GoPro or other recording devices. However these can still comfortable be fitted with FPV (first person view) gear.
The extra Yaw capability makes this a great multirotor for sports flyers wanting to perform more acrobatic manuevers.
Quadcopter: this is the frame most of us will be familiar with. Utilising 4 rotors, this particular airframe is a very good jack of all trades. More stable and with greater lifting capability than the Tripcopter, a Quadcopter makes a great middle ground for those wanting something with the capability of flying acrobatically as well as doing moderate lifting duties carrying devices like the GoPro as well as fitment of gimbals etc. While you can get larger quad layout airframes, you may find adding extra flight sensors, controllers and other accessories at times a tight fit.
This is also the frame most commonly used in 'FPV Racers,' smaller airframes with higher RPM motors capable of serious speeds and acrobatic ability to perform rolls and flips.
A good all rounder.
Hexacopter: this is the beginning of the 'heavy lifters.' The Hexacopter is the choice for heavy lifters who don't want to move to the Octocopter. If you're ultimate goal is to mount a camera, whether a smaller point and shoot or reasonably sized DLSR, this is the minimum you want go as the increased lifting capability and general stability of these frames will be highly desired.. With 6 rotors for increased lighting capability and generally larger prop size and ability to fit larger motors and more powerful ESC's to match, anyone with aspirations of serious photography / video filming should consider this as a minimum. These are usually larger frames so fitting extra sensors and accesssories (Gimbals, IR controllers for operating your camera in the air etc) shouldn't be too much of an issue and you should have enough room on the airframe to keep your install relatively clean and uncluttered.
It is also worth noting that the loss of one of the rotors either by ESC or Motor failure may not necessarily lead to a catastrophic loss of control to this configuration of airframe. Flight may still be possible, a loss of Yaw control maybe noticeable but getting a safe return of the airframe may still be possible.
*While most FPV racers are Quadcopters, there are a few small Hexacopters used in FPV racing also. Because 100+ km/h just isn't enough for some people.
Octocopter: basically all the pros and cons of the Hexa, the Octo is the choice for serious photography and video needs; it is easily able to carry larger payloads with great stability, the Octocopter is the choice of Professionals and Enthusiasts alike. This is not the frame for those looking for acrobatic or sports flying, it is purely a work horse.
Like the Hexa, it can also maintain stable flight even in the event of a rotor failing, in many cases 2 or more so it offers some safety for those hauling expensive equipment.
So, having picked the best frame for our intended use, it's time to pick probably the most vital component of our multirotor......
Flight Controllers
Like choosing your choice of multirotor airframe, your intended use of your multirotor can influence which flight controller you choose. The basic functionality of the flight controller does not change from one unit to the other, their primary function is to control the speed or each rotor, keeping the airframe in the air and stable. What does change is the feature set of each controller. While the majority of controllers offer some level of autonomy to near full autonomy through the integration of optional sensors, some of these flight controllers handle autonomous flying better than others while other flight controllers provide smoother and more responsive inputs making them excellent for acrobatic and sports flying where the pilot is seeking the thrill of the flying rather than taking a backseat and letting the flight controller take the wheel.
The Arduino board and Opensource software are two of the factors that have allowed for the exponential growth in the multirotor sector and there is a collective effort out there to constantly update and expand upon the multirotor source code. For coders and programmers, this open nature won't be too unfamiliar or complicated to pick up, for the regular user, this can be bit of a dive into the deep end; but don't fret, there is plenty of documentation out there and so long as you don't go making ill advised changes to the flight sketches and stick to the tried and tested ones, there shouldn't be any need for you to get involved here, just stick with what is known to work and update when the later updates are released and known to be as reliable as possible.
Most of the boards you encounter will be Arduino and Opensource based with few exceptions. How well they perform varies from one flight controller to the next.
This is not all of the flight controllers, but some of the more popular.
DJI
http://www.dji.com/
Even if you don't know who DJI are, you probably know their most popular mainstream product, the Phantom. DJI are the biggest commercial name in the multirotor business, if everyone else is Android, DJI are the industries Apple. Whether it's their mainstream line of Phantoms, their individual flight controller line Naza or their larger commercial line of Ace or Wookong systems, DJI position themselves as a company with a solid, simply to use flight ecosystem for the beginner to the professional.
For those after the simplest plug and play system straight out of the box with room for expansion and are interested more in the opportunities multirotors can afford them in aerial videos and photography, this maybe flight controller to consider for your multirotor frame.
This is commercial hardware and software designed for ease of use. If you have limited computer knowledge or are looking for a flight controller backed by a big manufacturer with warranty, this might the one to go with.
Arducopter
http://www.arducopter.co.uk/
Like the rest of the boards in this line up, Arducopter is opensource. Arducopter has a very powerful suite of features for automated flight and of the opensource flight controllers, it arguably has the most accurate and reliable automated features, rivalling that of DJI at a considerably lower price point. Ths software is also relatively easy to setup and use with a clean and easy to navigate GUI.
Flight Modes
-Acro: Full Manual
-Stabilise: On release of cyclic input, airframe will return to level flight (will still drift)
-Alt Hold: Airframe will maintain altitude.
-Loiter: Basically skyparking. Airframe will maintain position and altitude.
-Drift: Fly airframe with aeroplane characteristics
-Circle: Airframe circles a point of interest maintaining a focus on center of point of interest.
-Brake: After releasing cyclic stick input, airframe will come to a stop and stabilise in position where input was released (essentially enables Loiter after stick input)
-Follow Me: Does what it says. It will follow
-Return to Landing: Airframe will return to point of take off.
-Sport Mode: Will maintain Altitude and a fixed roll, pitch or yaw angle. Basically for panning shots.
-Guided: Airframe is instructed by commands via laptop / tablet and interactive software
-Auto: After selecting waypoints, the airframe will navigate along a path to each point. Certain tasks maybe incorporated into this mode like taking pictures, gimbal direction, loiter, point in specific direction etc.
*Some flight modes may require additional sensors or other hardware
CC3D
CC3D has largely disappeared now despite the fact the hardware still exists and is being manufactured the original OpenPilot software is becoming less common as pilot move over to Librepilot. Librepilot contains many of the original founding members of the Openpilot software source and is still being developed today.
Flight Modes
-Rate Mode / Acro: full manual
-Angle: Will not allow the airframe to exceed set angle. ie. Airframe cannot become inverted, will reach maximum angle and not allow it to exceed that.
-Horizon: A mix of Angle and Acro. Smaller inputs will maintain Angle mode, larger inputs will allow the airframe to perform as if in Acro mode, however when reverting back to smaller inputs or releasing cyclic, airframe will self level.
Position Hold and Return to Home are possible with some modification and additional hardware.
Naze32
Probably the most common board on the market today for FPV pilots and racers; designed to be an Acro board that did away with unnecessary features and bloated software code to give pilots the fastest, most precise flight input possible. This pursuit has led to a variety of hardware and software configurations that have been updated and redesigned at a staggering rate.
For the purpose of this description I won't be going into depth on the individual boards (of which there are many) available nor the many offshoots of software these are designed to run.
MultiWii
Interestingly, MultiWii is so named because the original iterations used the gyro and acccelerometer from the Wii-Mote and Nunchuk. Yeop, Nintendo actually inadvertently provided hardware for multirotors.
MultiWii is one of the oldest flight controllers around. Naturally both the hardware and software has undergone multiple iterations. Currently, MultiWii is a good choice for users wanting to fly full acro (manual) or automated as it features a suite of automated modes found in Arducopter and DJI systems. It should be noted though, that while this board and software is capable of many automated flight modes, these shouldn't really be relied upon in the same way as Arducopter or the DJI series of flight controllers.
Modes like GPS Hold where an airframe should remain stable in the air and 'hold' it's current position and altitude is not as stable or accurate as that found in other software and you may find the airframe drifting around or rising and dropping. Arducopter and DJI excel in these areas with excellent position holding capability.
In saying that, it's not that the mode doesn't function, it's that if such a mode is important to you, you may want to consider other boards as these modes are better executed there.. Otherwise, automated flight is capable on these boards and the source code allows a lot of flexibility between manual and auto flight modes making it an excellent all rounder.
Boards like the Paris v5r3 is also an excellent board as where other boards require you to 'add on' extra components like FPV OSD (first person view on screen display), voltage meters for OSD and other features, all of this is already ready to go on these boards.
Flight Modes
-Rate Mode / Acro: full manual
-Angle: Will not allow the airframe to exceed set angle. ie. Airframe cannot become inverted, will reach maximum angle and not allow it to exceed that.
-Horizon: A mix of Angle and Acro. Smaller inputs will maintain Angle mode, larger inputs will allow the airframe to perform as if in Acro mode, however when reverting back to smaller inputs or releasing cyclic, airframe will self level.
-Baro: Maintain altitude, can be adjusted with throttle to increase or decrease set altitude
-Mag: Maintain current yaw. ie. Nose will stay locked in one direction
-HeadFree: Changes the control of the airframe such that even if the airframe is pointing toward you, pushing up on cyclic will always move the airframe away from you, pushing left will always move it left. ie. You will not need to compensate for airframes current heading.
-HeadAdj: disables and resets current Headfree state in the event you have moved or changed direction and need to reset HeadFree position
-GPS Hold: Locks airframe into current position
-GPS Home: Returns airframe to take off position (does not land for you, only returns to point of take off
*Some flight modes may require additional sensors or other hardware




