-
Hey Guest. Check out your NeoGAF Wrapped 2025 results here!
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Multirotor MegaThread - They're UFO's, Not Drones!
- Thread starter Mohonky
- Start date
- Status
- Not open for further replies.
Jag
Member
When you say flips on take off, you mean it doesn't get into the air at all? It just rolls or pitches itself over from the ground or it starts to get into the air and then flips?
I don't mean to sound condescending or rude, but there has to be something going with the setup of the motors or the props here if it's trying to flip straight from the ground instead of lifting off.
You really have to double check this because something is off, double check;
- Motors are spinning in the correct direction (refer to CC3D Openpilot motor configuration for correct directions)
- Props are correct for direction of motor direction (2 counter clockwise, 2 clockwise)
- Props aren't upside down?
- I know you said you calibrated all ESC's, did you do it with a break out cable or did you do them all individually? Usually it's best to use a break out cable but doing them individually should be fine
Can you get a video of what it's doing?
I'm new to this, so any questions you ask can only help.
1. - Motors are spinning in the correct direction (refer to CC3D Openpilot motor configuration for correct directions)
A. Yes, checked and double checked.
2 - Props are correct for direction of motor direction (2 counter clockwise, 2 clockwise)
A. Yes, checked. Even labeled the props to ensure they go on the correct motor.
3- Props aren't upside down?
A. Yes. Went online to confirm that they were installed correctly.
4- I know you said you calibrated all ESC's, did you do it with a break out cable or did you do them all individually? Usually it's best to use a break out cable but doing them individually should be fine
A. Not sure what a break out cable is. The Quad was connected to a PC via USB and I calibrated the ESC using the Openpilot program for ESC calibration. Saved the configuration.
I can shoot a video this weekend. I packed everything up in frustration. My 11 year old and I are doing this as a father/son thing and it's been so aggravating for me. I just don't know enough about the hobby to troubleshoot this.
I'm new to this, so any questions you ask can only help.
1. - Motors are spinning in the correct direction (refer to CC3D Openpilot motor configuration for correct directions)
A. Yes, checked and double checked.
2 - Props are correct for direction of motor direction (2 counter clockwise, 2 clockwise)
A. Yes, checked. Even labeled the props to ensure they go on the correct motor.
3- Props aren't upside down?
A. Yes. Went online to confirm that they were installed correctly.
4- I know you said you calibrated all ESC's, did you do it with a break out cable or did you do them all individually? Usually it's best to use a break out cable but doing them individually should be fine
A. Not sure what a break out cable is. The Quad was connected to a PC via USB and I calibrated the ESC using the Openpilot program for ESC calibration. Saved the configuration.
I can shoot a video this weekend. I packed everything up in frustration. My 11 year old and I are doing this as a father/son thing and it's been so aggravating for me. I just don't know enough about the hobby to troubleshoot this.
check and make sure the "front" of the flight controller board is pointed at the right props. It sounds like its trying to level itself but giving more power to wrong motors causing it to flip.
some more TBS... http://team-blacksheep.com/products/product:98

Really love the way they laid out the internal circuit boards in this baby. Check out the kit build process https://www.youtube.com/watch?v=BqAhJv32vlQ
Mook1e
Member
If you want max flight time a wing is much more efficient than a multi rotor.
They are much harder to fly though...

I built a wing as my first project way back in 2005. VERY hard to fly...but I'm pretty sure I put it together wrong

I still have the radio, receiver, servos, esc, and motor....hmm, maybe I should give it another go.
Jag
Member
check and make sure the "front" of the flight controller board is pointed at the right props. It sounds like its trying to level itself but giving more power to wrong motors causing it to flip.
The only other thing I can think of is i installed the controller on the underside of the Quad because that's where the manual says it goes. So the arrow is pointing front, but the pins are facing down towards the ground.
When I level it in open pilot, it shows the quad as being level with the ground and having the right attitude (not flipped), so I didn't think it would be that. But perhaps I can try mounting the CC3D on the topside and see if it has an effect.
I also just got an Afronaze32 today, so I may give that shot. I don't know anything about Naze, but supposedly its used alot in the Quanam Venture.
The only other thing I can think of is i installed the controller on the underside of the Quad because that's where the manual says it goes. So the arrow is pointing front, but the pins are facing down towards the ground.
When I level it in open pilot, it shows the quad as being level with the ground and having the right attitude (not flipped), so I didn't think it would be that. But perhaps I can try mounting the CC3D on the topside and see if it has an effect.
I also just got an Afronaze32 today, so I may give that shot. I don't know anything about Naze, but supposedly its used alot in the Quanam Venture.
What board is it again? I am pretty sure the pins need to be towards the sky... I will ask my brother he knows more about the different open pilot boards.
edit: he says you can put it in facing the ground but you have to change some stuff

You want "rotate virtual attitude relative to board" to be 180 degrees on the roll axis. (he had 90 yaw because he had to mount his sideways for pin access.
Or just flip it around. It should not be on the underside anyway, they mean mount it to the top of the bottom plate.
Mohonky
Member
The only other thing I can think of is i installed the controller on the underside of the Quad because that's where the manual says it goes. So the arrow is pointing front, but the pins are facing down towards the ground.
When I level it in open pilot, it shows the quad as being level with the ground and having the right attitude (not flipped), so I didn't think it would be that. But perhaps I can try mounting the CC3D on the topside and see if it has an effect.
I also just got an Afronaze32 today, so I may give that shot. I don't know anything about Naze, but supposedly its used alot in the Quanam Venture.
Naze32 and CC3D are very similar. Both are popular with acro flyers.
Teknopathetic
Member
Canadian Drone Nationals are streaming live now:
http://racingfpv.com/?page_id=11524
Just some track practice runs and stuff happening now, so far as I can tell.
http://racingfpv.com/?page_id=11524
Just some track practice runs and stuff happening now, so far as I can tell.
Jag
Member
Jag did you get in the air yet?
Nope. Tried the CC3D on the top, but it still flipped. Put the Afro Naze32 in and spent most of Saturday getting it programmed. I didn't have a plastic case for the controller board, so I used some double sided tape to mount it to the Quad. Apparently that was a mistake because as soon as I plugged in the battery I got the 'sizzle, shock and smoke' of a fried controller.
So I packed up the Quanum yet again. I think my next move is probably going to be a DJI Naza M Lite controller and GPS. Which is what the PNF version comes with.
I didn't want to spend the cash, but I don't think open source is the way for me. I may bring it to a local hobby shop, but they charge a huge premium on this stuff and when I called they were like "Well, Hobby King can be hit or miss, so we're not sure if we can help".
Open to suggestions!
Mook1e
Member
I went ahead and bought to WLTOYS V686G and I found a few mods available for extended range and an FPV goggle mod for the screen.
https://www.youtube.com/watch?v=hv_gUPkvi1U
https://www.youtube.com/watch?v=R9DnDNGRaY0
I'm going to let my son get used to Line of Sight with the bigger quad and occasional glances at the screen before I mod it, though.
https://www.youtube.com/watch?v=hv_gUPkvi1U
https://www.youtube.com/watch?v=R9DnDNGRaY0
I'm going to let my son get used to Line of Sight with the bigger quad and occasional glances at the screen before I mod it, though.
Mohonky
Member
Nope. Tried the CC3D on the top, but it still flipped. Put the Afro Naze32 in and spent most of Saturday getting it programmed. I didn't have a plastic case for the controller board, so I used some double sided tape to mount it to the Quad. Apparently that was a mistake because as soon as I plugged in the battery I got the 'sizzle, shock and smoke' of a fried controller.
So I packed up the Quanum yet again. I think my next move is probably going to be a DJI Naza M Lite controller and GPS. Which is what the PNF version comes with.
I didn't want to spend the cash, but I don't think open source is the way for me. I may bring it to a local hobby shop, but they charge a huge premium on this stuff and when I called they were like "Well, Hobby King can be hit or miss, so we're not sure if we can help".
Open to suggestions!
What? Man sounds like you're going through the wars. I don't know that the Naza M is going to be much of a solution, the Naze32 and CC3D are way easier than the multiwii and if I can get that going, the Naze and CC3D should be a breeze.
Usually people use stand offs for the Naze boards, what did you double side it down too? Carbon fibre is conductive but I was looking at the frame and it mostly looks like fibreglass and plastic?
The power leads weren't wired back to front on the battery or board? What is your soldering like? You didn't accidentally bridge anything?
I went ahead and bought to WLTOYS V686G and I found a few mods available for extended range and an FPV goggle mod for the screen.
https://www.youtube.com/watch?v=hv_gUPkvi1U
https://www.youtube.com/watch?v=R9DnDNGRaY0
I'm going to let my son get used to Line of Sight with the bigger quad and occasional glances at the screen before I mod it, though.
Looks like a good mod and easy to do!
Jag
Member
What? Man sounds like you're going through the wars. I don't know that the Naza M is going to be much of a solution, the Naze32 and CC3D are way easier than the multiwii and if I can get that going, the Naze and CC3D should be a breeze.
Usually people use stand offs for the Naze boards, what did you double side it down too? Carbon fibre is conductive but I was looking at the frame and it mostly looks like fibreglass and plastic?
The power leads weren't wired back to front on the battery or board? What is your soldering like? You didn't accidentally bridge anything?
I mounted it on the fiberglass, maybe I hit something conductive. Didn't think so. It worked fine until i mounted it on the board, so something i did there was the problem.
It really is pretty demoralizing. My kid and I just want to get a decent rig up into the sky and I just can't get it off the ground.
Mohonky
Member
I mounted it on the fiberglass, maybe I hit something conductive. Didn't think so. It worked fine until i mounted it on the board, so something i did there was the problem.
It really is pretty demoralizing. My kid and I just want to get a decent rig up into the sky and I just can't get it off the ground.
At least it was a Naze lol. I let the magic smoke escape a $250 ESC in my 1/10 touring car. Shit sucks.
How was it mounted to do that? It just seems really odd, that's why I was asking if you occidentally bridged some solder joints somewhere?
Do you know what BEC is in the ESC?
Mook1e
Member
Yeah! My son is getting really good with the practice he's been able to get with the H8 mini. He's still cautious with using the VERY high yaw rates the H8 mini is capable of.Looks like a good mod and easy to do!
I'm getting pretty good myself.
gutterboy44
Member
Omg FPV flying 250 racers is addicting. I finished my ZMR250 build Thursday, and when ever I get a free moment I head to the nearby park and run a few batteries. So fucking awesome. Once I got my Quanum V2 headset fitting better and tweaked a few things in clean flight, it just clicked. I am so glad I practiced a ton inn FPV Freerider. Acro mode was cake and I only fly it now after like my second battery. I can't wait to tweak more settings and try some different props. It is such a rush bombing around in first person. Wow, I have been missing out.
Jag
Member
At least it was a Naze lol. I let the magic smoke escape a $250 ESC in my 1/10 touring car. Shit sucks.
How was it mounted to do that? It just seems really odd, that's why I was asking if you occidentally bridged some solder joints somewhere?
Do you know what BEC is in the ESC?
I may have bridged them. Not sure the BEC, maybe .5a. They are afro ESC.
Mook1e
Member
Omg FPV flying 250 racers is addicting. I finished my ZMR250 build Thursday, and when ever I get a free moment I head to the nearby park and run a few batteries. So fucking awesome. Once I got my Quanum V2 headset fitting better and tweaked a few things in clean flight, it just clicked. I am so glad I practiced a ton inn FPV Freerider. Acro mode was cake and I only fly it now after like my second battery. I can't wait to tweak more settings and try some different props. It is such a rush bombing around in first person. Wow, I have been missing out.
Awesome gutterboy!
So how much previous experience did you have with Quad flying would you say?
I know you said you had a DJI Phantom. How much flying did you do unassisted prior to this FPV?
Do you envision getting fat sharks in the future, or is the Quanum V2 comfortable for extended periods?
I'm seriously about to pull the trigger on an RTF FPV quad, particularly since I'm loving the little micro I already have. I'm trying to decide if I should buy a larger intermediate Quad prior to jumping directly to the 250+ class FPV.
The price of entry for the new RTF FPV quads is incredibly low in my opinion.
I'll keep flying LoS with whatever I get before moving to FPV.
My son still doesn't know he's getting the WLToys V686G FPV for his birthday on Friday!
He's flying the H8 mini well and he's actually more conservative with it than I am!
I have had to replace a motor on his H8 mini and my own so far.
Jag
Member
Awesome gutterboy!
So how much previous experience did you have with Quad flying would you say?
I know you said you had a DJI Phantom. How much flying did you do unassisted prior to this FPV?
Do you envision getting fat sharks in the future, or is the Quanum V2 comfortable for extended periods?
I'm seriously about to pull the trigger on an RTF FPV quad, particularly since I'm loving the little micro I already have. I'm trying to decide if I should buy a larger intermediate Quad prior to jumping directly to the 250+ class FPV.
The price of entry for the new RTF FPV quads is incredibly low in my opinion.
I'll keep flying LoS with whatever I get before moving to FPV.
My son still doesn't know he's getting the WLToys V686G FPV for his birthday on Friday!
He's flying the H8 mini well and he's actually more conservative with it than I am!
I have had to replace a motor on his H8 mini and my own so far.
While I'm working on my nightmare Quad, I was thinking about getting an "entry" RTF FPV. I did some preliminary research and like this Nano QX which comes with a Fat Shark RTF. It's about $400, but I don't know the price points of these things. Some people report the brushing on the motors wearing out after a year or so, plus they are saying 5min or less flight time. Again, I don't know what is standard.
I'd like something you can jump into easy with goggles.
gutterboy44
Member
Awesome gutterboy!
So how much previous experience did you have with Quad flying would you say?
I know you said you had a DJI Phantom. How much flying did you do unassisted prior to this FPV?
Do you envision getting fat sharks in the future, or is the Quanum V2 comfortable for extended periods?
I'm seriously about to pull the trigger on an RTF FPV quad, particularly since I'm loving the little micro I already have. I'm trying to decide if I should buy a larger intermediate Quad prior to jumping directly to the 250+ class FPV.
The price of entry for the new RTF FPV quads is incredibly low in my opinion.
I'll keep flying LoS with whatever I get before moving to FPV.
My son still doesn't know he's getting the WLToys V686G FPV for his birthday on Friday!
He's flying the H8 mini well and he's actually more conservative with it than I am!
I have had to replace a motor on his H8 mini and my own so far.
My only quad fly experience was with my Phantom FC40 last year. I flew it in GPS mode when learning and then ATTI mode when in open areas. Never bothered with manual since it isn't necessary for Phantom flying unless you want the challenge, which I did not in my limited time flying it. I just wanted to keep it in one piece and take nice aerial video. However, that all changed as soon as I started looking in to maybe upgrading some bits on my FC40 or buying a newer Phantom. That is when I saw the emerging FPV racing scene and immediatly made the decision to sell my phantom to fund the jump in to FPV. I am so glad I did, it is so damn fun. Acro mode clicked with me straight away (I did practice a lot in FPVFreerider which I highly recommend)
As for the Quanum V2's? I think they are the absolute no brainier choice for entry level FPV goggles/headset. $56 is absurdly good value. They take like 15 minutes to assemble and since they are a foam shell, you can customize the face fit to exactly how you want it with a razor or dremel. I've never worn fatsharks, but I assume they are probably much more comfortable, however, I think fatshark pricing is a joke. Their margins must be ridiculous and as the competition for FPV headsets continues to increas, I can't see them maintain it for much longer. The Dominator V3's seem like the last model but with a few extras tacked on, not some new super clarity screens or something. The affordable fathsharks have really poor screens from what I read and to get something decent, you have to spend ~$300, which is way to much for me at this point. Most of the forum advice I saw is, go Fatshark if you can afford the better models, but if you are in the budget range of fatsharks (attitudes and teleporters I think) save the money and get the Quanum V2s. Worst case scenario, you can always take your Qunanum V2 LCD screen out and use it as a tripod mount screen or as a secondary viewing screen for friends or testing.
Edit: You do look like a goofball with the Quanum's though. But I couldn't care less about that.
Mook1e
Member
Per gutterboy's post above, I wouldn't even deal with the Nano QX. The quad itself is tiny and limited. The fat sharks are very expensive. Get a practice quad for $15-$40 (with replacement parts and extra batteries), the Quanam V2 kit, and one of the full 250 FPV RTF kits for the same price or less.While I'm working on my nightmare Quad, I was thinking about getting an "entry" RTF FPV. I did some preliminary research and like this Nano QX which comes with a Fat Shark RTF. It's about $400, but I don't know the price points of these things. Some people report the brushing on the motors wearing out after a year or so, plus they are saying 5min or less flight time. Again, I don't know what is standard.
I'd like something you can jump into easy with goggles.
The Walkera Runner 250 is about $230. It has everything you need to fly minus the headset and tx batteries. Add $52 for the Quanam and you're ready to go (Oops, you'll need an FPV receiver as well).
There are, of course, extras I would recommend.
Spare parts like 2 extra motors, maybe an ESC or two, extra batteries, extra props, a better charger.
These are things (minus the ESC) you would/should get with the Nano QX if you got it instead anyway.
gutterboy44
Member
Per gutterboy's post above, I wouldn't even deal with the Nano QX. The quad itself is tiny and limited. The fat sharks are very expensive. Get a practice quad for $15-$40 (with replacement parts and extra batteries), the Quanam V2 kit, and one of the full 250 FPV RTF kits for the same price or less.
The Walkera Runner 250 is about $230. It has everything you need to fly minus the headset and tx batteries. Add $52 for the Quanam and you're ready to go.
There are, of course, extras I would recommend.
Spare parts like 2 extra motors, maybe an ESC or two, extra batteries, extra props, a better charger.
These are things (minus the ESC) you would/should get with the Nano QX if you got it instead anyway.
Extra props are a must. Apparently the DAL props are great for learning because they take a licking and keep on ticking. I have only been running HQ's since I started, and they are silky smooth but they break anytime I make minor contact with something. I'm going to save my remaining HQ's for PID tuning and go with gemfans and maybe try dal props for messing about and learning to fly through gates hehe.
Oh man. I just found a mom and pop electronics shop nearby. Super cheap prices. Every connector you can imagine. A whole wall is covered in arduino modules. Now I can cut all the wires cause I know where to find new connectors, soldering equipment, raw wire. They have a 3d printer in the shop.
As for nano QX I would only pick one up to practice flying line of sight in rate mode so not the FPV model.
As for nano QX I would only pick one up to practice flying line of sight in rate mode so not the FPV model.
Teknopathetic
Member
Got a Shendrones Tweaker FPV Addiction in the mail today, immediately built it up and took it to the park for a couple of packs. Pretty snappy little thing.



my stuff
6 Turnigy multistart 320kv motors
DJI Naza M lite GPS
Tarot X6
7 Turnigy Multistart 40amp ESCs
6 17x5 props.
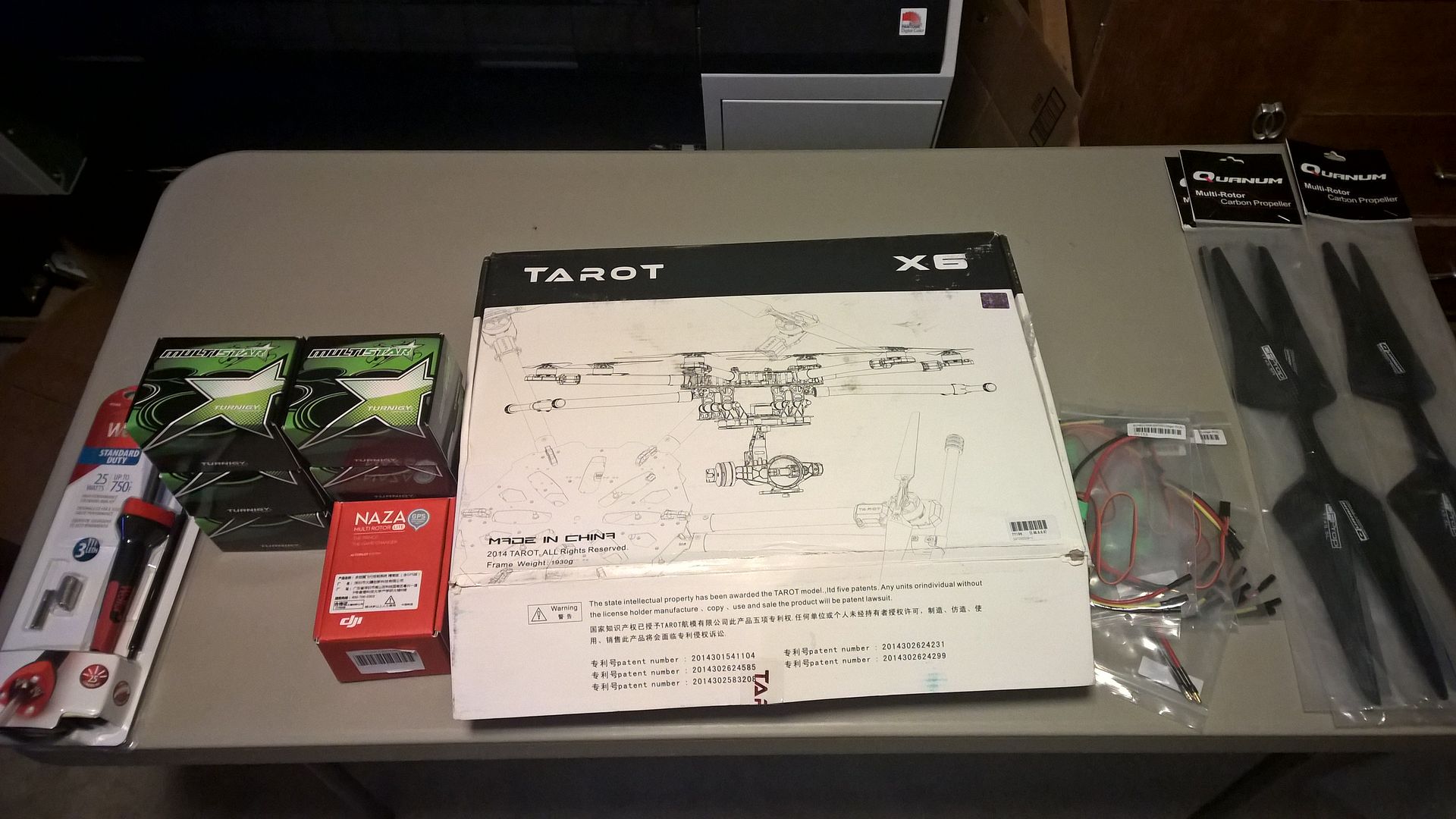
And I found my gimbal I think.
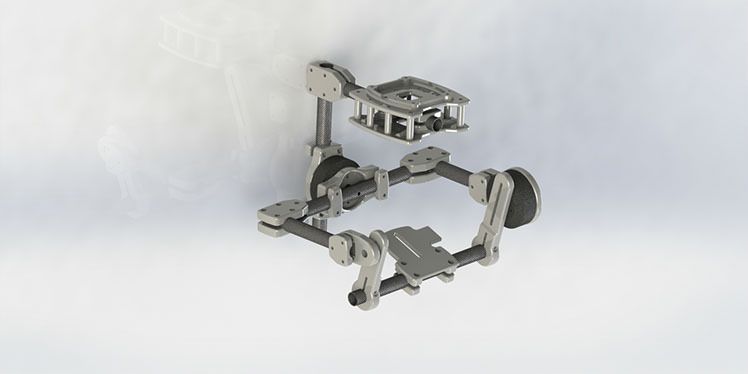
http://www.klinkeraerospace.com/dslr-gimbal.html
Decided on a battery and controller.
Going to start building finally.
6 Turnigy multistart 320kv motors
DJI Naza M lite GPS
Tarot X6
7 Turnigy Multistart 40amp ESCs
6 17x5 props.

And I found my gimbal I think.

http://www.klinkeraerospace.com/dslr-gimbal.html
Decided on a battery and controller.
Going to start building finally.
anyone know of a good place to get M3x8mm hex screws in US? Can't mount the motors without these screws, went to Frys, home depot and lowes today and no one had them. The smallest home depot and lows had was M3x16mm which is far too long. Some seller has them on amazong but the earliest is says it will get here is sometime between November 16th and December. >.>
Teknopathetic
Member
"anyone know of a good place to get M3x8mm hex screws in US? Can't mount the motors without these screws, went to Frys, home depot and lowes today and no one had them. The smallest home depot and lows had was M3x16mm which is far too long. Some seller has them on amazong but the earliest is says it will get here is sometime between November 16th and December. >.>"
My local home depot definitely had M3x8mm hex screws. Barring that, check out some quadcopter stores like readymaderc or multirotorsuperstore.
Ultimately more expensive than grabbing a pack out of Home Depot and I'd be surprised if these guys weren't grabbing some screws out of Home Depot and repackaging them, but if there's no other local option...
My local home depot definitely had M3x8mm hex screws. Barring that, check out some quadcopter stores like readymaderc or multirotorsuperstore.
Ultimately more expensive than grabbing a pack out of Home Depot and I'd be surprised if these guys weren't grabbing some screws out of Home Depot and repackaging them, but if there's no other local option...
Mohonky
Member
Hey guys I know I have been MIA for a bit, I just moved and have no internet and from I am hearing, that won't be changing anytime soon. However I'll make an effort to swing in here more often.
When I am settled right in I'll be able to get in here more often but with no fixed adsl or NON I can't do a great deal.
On the meantime, I was working on my kits on a 1200mm table between two cars, now I have a workshop in the shed so I'll be getting my quads back together soon, not working yet so money is still right but when I do start getting back to work I'll be looking at doing some more stuff and whenever I get internet, I'll put up some videos and instructional bits and pieces.
Also got 2 big flying clubs here and a massive off-road 1/8 and 1/10 club. Going to get right into it when the money is coming back in
When I am settled right in I'll be able to get in here more often but with no fixed adsl or NON I can't do a great deal.
On the meantime, I was working on my kits on a 1200mm table between two cars, now I have a workshop in the shed so I'll be getting my quads back together soon, not working yet so money is still right but when I do start getting back to work I'll be looking at doing some more stuff and whenever I get internet, I'll put up some videos and instructional bits and pieces.
Also got 2 big flying clubs here and a massive off-road 1/8 and 1/10 club. Going to get right into it when the money is coming back in
Mook1e
Member
Hey Mohonky, thanks for the update!
My son loves his V686G, but I think he's ready to move on to a more aerobatic quad. We have three H8 mini quads (which are great to learn on, but also quite maneuverable in 100% rate mode), and we just received three JJRC JJ1000 quads (Gearbest has a sale on the blue BNF model for $9.99 right now!) which are speed demons!
I've ordered Picnic Quads frames and I'll be making two Frankenquads with two of the JJ1000.
I expect to use these projects as stepping stones towards a "full size" 250mm FPV racer.
I'll make one Efficiency quad for flight practice and payload flight testing.

and another 120mm FPV racer frame for further testing and eventual FPV

I think I'm going to build a Quanum DIY FPV goggle set to start flying FPV.

I've been watching the AndyRC channel on youtube and it's great for ideas.
I'll be using this video on building an FPV plate as a reference when I add my accessory plate to the above racer frame.
https://www.youtube.com/watch?v=6FXYDZCIlE4
I hope my first FPV quad will be configured similar to the top right quad in this photo:

I will eventually buy a hobby grade transmitter, most likely a Walkera 7E so I can modify it to also fly the toy grade JJ1000 based quads.
I do think the Taranis radios with the voice-enabled mode alerts are cool, but pretty expensive.
My son loves his V686G, but I think he's ready to move on to a more aerobatic quad. We have three H8 mini quads (which are great to learn on, but also quite maneuverable in 100% rate mode), and we just received three JJRC JJ1000 quads (Gearbest has a sale on the blue BNF model for $9.99 right now!) which are speed demons!
I've ordered Picnic Quads frames and I'll be making two Frankenquads with two of the JJ1000.
I expect to use these projects as stepping stones towards a "full size" 250mm FPV racer.
I'll make one Efficiency quad for flight practice and payload flight testing.
and another 120mm FPV racer frame for further testing and eventual FPV
I think I'm going to build a Quanum DIY FPV goggle set to start flying FPV.
I've been watching the AndyRC channel on youtube and it's great for ideas.
I'll be using this video on building an FPV plate as a reference when I add my accessory plate to the above racer frame.
https://www.youtube.com/watch?v=6FXYDZCIlE4
I hope my first FPV quad will be configured similar to the top right quad in this photo:
I will eventually buy a hobby grade transmitter, most likely a Walkera 7E so I can modify it to also fly the toy grade JJ1000 based quads.
I do think the Taranis radios with the voice-enabled mode alerts are cool, but pretty expensive.
Mohonky
Member
What's the story with the quanum DIY fpv goggles? Never heard of it. Does it use a phone for the screen by the look of it?
Interested to see how your DIY quads with the Walkera stuff goes!
Multirotors capable of inverted flight and even 3D are starting to take off now; some just reverse motor direction so they don't do the stuff you expect from a 3D heli, but some are capable of reverse pitch which make them fully 3D capable, will be interesting to see! I know a mate of mine at HK told me they have one coming soon called the Air Dancer I think, he said it was cool so I'll be interested to see that.
I still haven't gotten round to doing anything with my quads as I have been setting stuff up around the house, still sorting boxes from the move taking some stuff to the dump, some stuff to sell and getting the workshop together.
I have however finally gotten round to ordering some parts for my HK450 Pro helicopter a mate gave me. He never used it and got an actual Align 450 where the HK450 is basically identical, it's a clone. It was originally a flybar unit but it has no head on it currently and it has shitty plastic geared servos and no blades. Just ordered a flybarless DFC head, 3 Hitec metal gear servos for the cyclic, blades, a new canopy and an FrSky sbus Futaba compatible servo so I can use my 14SG with it. So I'm going to work on getting that into the air when they arrive. Going to use the 3GX flight control unit off the 700 as I'm not going near that till I am really confident with the 450 size.
Have my Scarab Reconn sitting there since I last smashed it. The Accelerometer copped a knock and locked itself to some weird reading, but that was fixed and a Gimbal has since been added so all it needs is reassembly and then some test flights to tune PID's. Same story with my Hoverthings Flip 360, just needs some balast on the front and tuning of PID and it should also be good to go.
But I also have 4 cars that need to be pulled down and rebuilt also, so as to when I really get flying again not too sure.
Interested to see how your DIY quads with the Walkera stuff goes!
Multirotors capable of inverted flight and even 3D are starting to take off now; some just reverse motor direction so they don't do the stuff you expect from a 3D heli, but some are capable of reverse pitch which make them fully 3D capable, will be interesting to see! I know a mate of mine at HK told me they have one coming soon called the Air Dancer I think, he said it was cool so I'll be interested to see that.
I still haven't gotten round to doing anything with my quads as I have been setting stuff up around the house, still sorting boxes from the move taking some stuff to the dump, some stuff to sell and getting the workshop together.
I have however finally gotten round to ordering some parts for my HK450 Pro helicopter a mate gave me. He never used it and got an actual Align 450 where the HK450 is basically identical, it's a clone. It was originally a flybar unit but it has no head on it currently and it has shitty plastic geared servos and no blades. Just ordered a flybarless DFC head, 3 Hitec metal gear servos for the cyclic, blades, a new canopy and an FrSky sbus Futaba compatible servo so I can use my 14SG with it. So I'm going to work on getting that into the air when they arrive. Going to use the 3GX flight control unit off the 700 as I'm not going near that till I am really confident with the 450 size.
Have my Scarab Reconn sitting there since I last smashed it. The Accelerometer copped a knock and locked itself to some weird reading, but that was fixed and a Gimbal has since been added so all it needs is reassembly and then some test flights to tune PID's. Same story with my Hoverthings Flip 360, just needs some balast on the front and tuning of PID and it should also be good to go.
But I also have 4 cars that need to be pulled down and rebuilt also, so as to when I really get flying again not too sure.
Teknopathetic
Member
"What's the story with the quanum DIY fpv goggles? Never heard of it. Does it use a phone for the screen by the look of it? "
They use some off the shelf LCD display without the monitor casing, etc. and put that in a polystyrene enclosure. I've heard the V2s are actually pretty nice. They look hideous, but they have a pretty large field of view (much larger than any of the Fatshark offerings, for example). They're just extremely large and a bit unwieldy.
They use some off the shelf LCD display without the monitor casing, etc. and put that in a polystyrene enclosure. I've heard the V2s are actually pretty nice. They look hideous, but they have a pretty large field of view (much larger than any of the Fatshark offerings, for example). They're just extremely large and a bit unwieldy.
Teknopathetic
Member
A little bit yeah, it's a 5" screen. Price is really good on them.
Mook1e
Member
Yes, the Quanum DIY is pretty big, but I've heard they're light. Also, I'm looking at this Eachine receiver module to keep the size down:

My son and I put together the efficiency frankenquad last night and it flies great!
I've saved about 7 grams of weight with the efficiency frame.
I hope to save 5 grams going to the FPV frame. It'll be interesting once I add the fpv accessory plate and equipment. I need to order those components and some different battery sizes.
I'm still having a blast, though.
The frankenquad is crazy agile.
My son and I put together the efficiency frankenquad last night and it flies great!
I've saved about 7 grams of weight with the efficiency frame.
I hope to save 5 grams going to the FPV frame. It'll be interesting once I add the fpv accessory plate and equipment. I need to order those components and some different battery sizes.
I'm still having a blast, though.
The frankenquad is crazy agile.
Mohonky
Member
Yes, the Quanum DIY is pretty big, but I've heard they're light. Also, I'm looking at this Eachine receiver module to keep the size down:
My son and I put together the efficiency frankenquad last night and it flies great!
I've saved about 7 grams of weight with the efficiency frame.
I hope to save 5 grams going to the FPV frame. It'll be interesting once I add the fpv accessory plate and equipment. I need to order those components and some different battery sizes.
I'm still having a blast, though.
The frankenquad is crazy agile.
Sounds like you and you're son are right into it, good hobby for you two to be working on, a lot of problem solving and other skills involved.
Haha you're way more organised than me, I just look at it and go the Clarkson route, "Powahhh!!!!" if things are a bit heavy.
My Hoverthings Flip 360 is just too underpowered on 3S and I haven't been bothered to spend the money on higher KV motors to compensate for it. As a result, I went up to 4S but the battery is heavy and the chasis is designed for a gopro in the front so it's been way out of whack and I needed to weigh the front down, but now I've been worried I've over weighted it and it won't be nearly as nimble as I want it. Needs some readjusting.
I took my toy quad out the other day and had an absolute ball, was flying it line of site in every orientation and for some reason never had any dramas which was where I was freaking out about before with my larger ones, though because it's a toy and I didn't care about smashing it maybe thats why I was able to fly the way I did, wasn't at all concerned about making a mistake so I was more relaxed.
Has been over a year since I did anything with my RC stuff so that little play around has me wanting to get right back into it.
Still finishing up my Losi 5ive tear down at the moment, its taking ages for a few reasons, but I got all my parts for my Trex 450 for the DFC conversion and then it'll take some time to setup as it'll be my first attempt at it but in between I'm going to have a go at getting the quads together too, so hoping before the new year swings round I'll have all of them up and ready to go.
Alright, these things look like a bunch of fun. As per some of the advice I keep seeing, I'm thinking of grabbing a cheap one as a kind of curiosity-scratching, stocking-filler for christmas. From my reading, it seems the Hubsan X4 H107C and the Syma X5C each come highly recommended, with the Hubsan (AUD$80-$120ish) being approximately double the price of the Syma (AUD$50-$70).
/edit: upon further reading, it seems the Syms X5SW is the way to go, or perhaps the Discovery U818A-1. Can get a kit with 5 batteries and a neat little charge station for like, $120 and have it delivered by Friday.
/edit 2: oh no I've fallen down a rabbit hole of reviews and videos and ahhhhwhatamIdoingwithmyselfonTuesdaymorningatwork?
Am I on the right track with those two suggestions? I'm thinking it might be fun to zoom up a little bit above local sporting events (though not directly above the people, for obvious reasons) and take some interesting photos. I was given a cheap RC helicopter years ago, when they first started appearing everywhere, and it was a bunch of fun to just fly it around the yard and land successfully; these seem like the logical progression to that!
/edit: upon further reading, it seems the Syms X5SW is the way to go, or perhaps the Discovery U818A-1. Can get a kit with 5 batteries and a neat little charge station for like, $120 and have it delivered by Friday.
/edit 2: oh no I've fallen down a rabbit hole of reviews and videos and ahhhhwhatamIdoingwithmyselfonTuesdaymorningatwork?
Well, we got there in the end. Turns out, the lure of FPV 'real time' (or several seconds delay, as the case may be!) viewing of footage was too appealing, so we grabbed a Syma X5SW-1, with 5x 850mAh batteries, charger and hard carry case. Hopefully it makes it here for Christmas.
Mohonky
Member
/edit. Cancelled that. Too much choice!
Well, we got there in the end. Turns out, the lure of FPV 'real time' (or several seconds delay, as the case may be!) viewing of footage was too appealing, so we grabbed a Syma X5SW-1, with 5x 850mAh batteries, charger and hard carry case. Hopefully it makes it here for Christmas.
Where's it coming from?
I hate waiting for RC stuff, it is like waiting for Christmas for me being my favourite hobby.
I just found out today some stuff I ordered for my Losi 5ive won't be coming because one of the parts I ordered won't be here, after I put in roughly 15hrs+ of cleaning and rebuilding it. Not happy. I was hoping to get it running by the end of this week. Won't happen to mid next week now.
Anyway on the Quad, congrats! Just check the latency on the camera, I suspect there might be a bit too much over WiFi, there's a reason we still FPV over a basic analogue signal in standard def. The only usable HD signal is by DJI, and it's about $1400 from memory. The camera and wifi there is more a way of framing your shots than trying to fly from.
Also avoid using Head Free at any cost. Have a look back at my OP on learning to fly. Head Free will just confuse the shit out of you if you learn using that mode and want to move up to something more serious or get into the racers etc.
So yeh, anyway seeing as the Losi 5ive tear down is essentially done minus the 2 little bits I need before getting it running, I took to getting my Hoverthings Flip 360 and Scarab Reconn in the air.
After some rearranging of components and some balast to compensate for the fact I won't be using the gopro on the front of the Flip 360, it's all settled now. It is slightly nose heavy by few grams but that's usually how you want it. Unfortunately the PID's are a mess, I need to take them back to default as I was trying to tune it before with the weird weight balance, don't ask what I was thinking. But yeh, happily, it's pretty much good to go, just need a still day to sort out the tuning.
The Scarab Reconn on the other hand I'm not sure. It was partially torn down as the last flight I went out on resulted in a tree jumping out in front of it and locking the Accelerometer to a bad reading. Quinton at Multiwii replaced it free of charge (good man!!) and I figured that was the problem but I put it all back together and went to fly it but it kind of went really bad. It went to take off and immediately threw itself into a hard roll and snapped a motor shaft yesterday. So I replaced the motor shaft and had to resolder some wiring on the gimbal as the tiny guage wire didn't really survive being tugged at when it turtled. It's all back together like the Flip 360 I think I need to go back, reset all the software and start from a clean slate and see what reading the gyro and acc are giving because it wouldn't even arm today. Though silly me didn't do an acc calibration before flight yesterday so I figure that might have been the cause of the flip.
So I have two quads sitting there needing some software going over, my Trex450 has all the parts I need to get it in the air but I haven't started putting them in yet, I think because I am procrastinating on the setup process which looks like a really steep learning curve and the Trex700 well, that won't go into the air for ages now, at least not until I am comfortable on the Trex450. I probably shouldn't have bought 4 batteries for it, as it'll be nearly 2 years of them sitting doing nothing before it even gets fired up. The batteries are holding voltage and balance perfectly as they've never been used so I am just hoping they will still be good when I get round to using it because they are expensive. If they aren't, that'll be $600AUD down the drain. Whoops. Praying they stay good.
Also, GOOD NEWS! I know how Gaffers love a backlog of video games, I'm adding to my backlog of RC's!! I purchased one of these tonight, Santa is going to throw in toward it so I figured why not, I've always been curious about it and I love the look of it so I ordered one.
I didn't want another quad, I can FPV and fly the shit out of the 360 size Flip 360, if I want to race down the track I'll look into a smaller 250 class, but I did want something more sporty and helicopter like in it's ability to yaw and perform flips and rolls, this fit the bill;
I'd love to do this to it, but I fear I would lack the necessary skill;

Looks pretty slick in the air;
https://www.youtube.com/watch?v=r-30KHfS6sk&feature=youtu.be
I know how to make all these damn things now but I'm building more of them than flying, one day I'll learn to be as competent at flying the bloody things as I am at building them and cable management.....I mean I love flying them, but then I get scared of pushing myself doing much more than loitering about the place and smashing them....maybe I've just addicted to collecting and constantly rewiring?
Wow how did I miss this thread until now! I'll definitely read through all of it when I've got the time.
My PhD is about using UAVs in agriculture and forestry so it's very relevant to my interests")
I am looking more specifically at applications that involve ground interactions like precision crop spraying and sampling. I'm still in my provisional year though so I'm still finalising/refining my research proposal. Should be a lot of fun!
Earlier this year I participated in this UAV competition with a couple of other students and staff from my faculty. The competition had 3 different challenges all based around the film industry's needs. The challenge we entered was all about developing technology to enable a UAV to stay in the same place when there's wind (at the moment people just can't shoot footage when it's too windy).
We managed to get into the finals so we were given $10k to develop a prototype to showcase our tech.
The final prototype ended up costing around $4.5, but that was inflated a lot by the RTK-GPS used (Piksi from SwiftNav) we bought. Here's what it looked like:
[image]
As you can see, it looks a bit messy (and that extra platform probably creates a lot of unnecessary drag) but it's a prototype so don't judge
It's about 1.1m in diameter rotor to rotor and it weighs just under 7 kg. We managed to get around 15 minutes of flight time using two 6S 8,000mAh batteries.
The main ideas behind the prototype were to 1. measure the wind and 2. react to the wind faster. We implemented the first idea by using a pitot tube (the metallic tube sticking out of the front). If you look carefully you can also see that the rotors are twisted — this enables us to use what's called thrust vectoring, i.e. the octocopter can move sideways without having to pitch or roll. Another good thing is that if you get pushed sideways by the wind you can react faster by almost instantly applying a force in the opposite direction (whereas a normal octocopter would have to first pitch and/or roll which takes time).
The UAV itself is based on a Tarot Ironman T1000 frame. The build/material quality is really decent for the price but we had a couple of issues with it: it doesn't have an integrated power distribution board (PDB) so we ended up using two hexacopter PDBs instead (but it looks quite messy and adds some unnecessary weight). It's also designed to be flown in the + configuration (e.g. the forward direction is in line with one of the booms), whereas we wanted to fly in the X configuration. We added an extra laser cut plate at the top to align everything properly.
The motors/ESCs are from DJI (E800) with 13" props. They were slightly underpowered for the size of the craft, we could have gotten a more agile UAV by using more powerful motors. The locking mechanism for the props is just great though, it literally takes 2 seconds to put one on or take one off (push and twist basically) and they are pretty quiet compared to literally all the other motors we have in our lab.
We used a Pixhawk as our flight controller since most of the work we did was in software rather than in hardware. It's a powerful platform and it's open source which is great for us.
Apart from that we had quite a few sensors on there: pitot tube, normal GPS, Piksi RTK differential GPS (for cm-level accuracy), Pixy camera for blob tracking and positioning indoor, Lidar Lite V2 for height measurement (way more accurate than relying on the barometer) and an optical flow sensor for station keeping when there's no GPS reception.
A lot of our work was on the software side of things: creating/modifying the control systems to make use of the extra capabilities and sensors available.
We did a fair bit of outdoors testing in a park close to our university. I wasn't the one flying it but it was still always nerve-wracking because of how big the UAV was. We never crashed which I'm really thankful for. When you are making changes to the flight controller code there's only so much you can test before going for a test fly... But it's always worth it, it just feels really rewarding to see that UAV you built fly.
We got lots of interested passerby. I was quite surprised that no one ever complained. We were completely operating within the legal framework but I heard stories of people getting really defensive about their private space (also, according to the law if anyone asks you to stop flying your UAV on a public property you need to oblige which would have been a massive pain).
We didn't win the competition in the end but it was an awesome experience and I really learned tons about UAVs. The team that won had a really, really cool concept and I'm really looking forward to how it'll all turn out. They will be attending a UAV Expo in Las Vegas next year so they might show something then.
Back on the topic of my PhD, my supervisor bought an Aeronavics Skyjib 8 for me to use next year. I'll definitely post photos of the assembly in this thread once I get round to assembling it. Another PhD student in my lab has a Skyjib X4 (coaxial octocopter) and that thing is a monster. It's about 10kg and can provide close to 30 kg of thrust. I saw it fly once and it was equally amazing and scary.
My PhD is about using UAVs in agriculture and forestry so it's very relevant to my interests
I am looking more specifically at applications that involve ground interactions like precision crop spraying and sampling. I'm still in my provisional year though so I'm still finalising/refining my research proposal. Should be a lot of fun!
Earlier this year I participated in this UAV competition with a couple of other students and staff from my faculty. The competition had 3 different challenges all based around the film industry's needs. The challenge we entered was all about developing technology to enable a UAV to stay in the same place when there's wind (at the moment people just can't shoot footage when it's too windy).
We managed to get into the finals so we were given $10k to develop a prototype to showcase our tech.
The final prototype ended up costing around $4.5, but that was inflated a lot by the RTK-GPS used (Piksi from SwiftNav) we bought. Here's what it looked like:
[image]
As you can see, it looks a bit messy (and that extra platform probably creates a lot of unnecessary drag) but it's a prototype so don't judge
It's about 1.1m in diameter rotor to rotor and it weighs just under 7 kg. We managed to get around 15 minutes of flight time using two 6S 8,000mAh batteries.
The main ideas behind the prototype were to 1. measure the wind and 2. react to the wind faster. We implemented the first idea by using a pitot tube (the metallic tube sticking out of the front). If you look carefully you can also see that the rotors are twisted — this enables us to use what's called thrust vectoring, i.e. the octocopter can move sideways without having to pitch or roll. Another good thing is that if you get pushed sideways by the wind you can react faster by almost instantly applying a force in the opposite direction (whereas a normal octocopter would have to first pitch and/or roll which takes time).
The UAV itself is based on a Tarot Ironman T1000 frame. The build/material quality is really decent for the price but we had a couple of issues with it: it doesn't have an integrated power distribution board (PDB) so we ended up using two hexacopter PDBs instead (but it looks quite messy and adds some unnecessary weight). It's also designed to be flown in the + configuration (e.g. the forward direction is in line with one of the booms), whereas we wanted to fly in the X configuration. We added an extra laser cut plate at the top to align everything properly.
The motors/ESCs are from DJI (E800) with 13" props. They were slightly underpowered for the size of the craft, we could have gotten a more agile UAV by using more powerful motors. The locking mechanism for the props is just great though, it literally takes 2 seconds to put one on or take one off (push and twist basically) and they are pretty quiet compared to literally all the other motors we have in our lab.
We used a Pixhawk as our flight controller since most of the work we did was in software rather than in hardware. It's a powerful platform and it's open source which is great for us.
Apart from that we had quite a few sensors on there: pitot tube, normal GPS, Piksi RTK differential GPS (for cm-level accuracy), Pixy camera for blob tracking and positioning indoor, Lidar Lite V2 for height measurement (way more accurate than relying on the barometer) and an optical flow sensor for station keeping when there's no GPS reception.
A lot of our work was on the software side of things: creating/modifying the control systems to make use of the extra capabilities and sensors available.
We did a fair bit of outdoors testing in a park close to our university. I wasn't the one flying it but it was still always nerve-wracking because of how big the UAV was. We never crashed which I'm really thankful for. When you are making changes to the flight controller code there's only so much you can test before going for a test fly... But it's always worth it, it just feels really rewarding to see that UAV you built fly.
We got lots of interested passerby. I was quite surprised that no one ever complained. We were completely operating within the legal framework but I heard stories of people getting really defensive about their private space (also, according to the law if anyone asks you to stop flying your UAV on a public property you need to oblige which would have been a massive pain).
We didn't win the competition in the end but it was an awesome experience and I really learned tons about UAVs. The team that won had a really, really cool concept and I'm really looking forward to how it'll all turn out. They will be attending a UAV Expo in Las Vegas next year so they might show something then.
Back on the topic of my PhD, my supervisor bought an Aeronavics Skyjib 8 for me to use next year. I'll definitely post photos of the assembly in this thread once I get round to assembling it. Another PhD student in my lab has a Skyjib X4 (coaxial octocopter) and that thing is a monster. It's about 10kg and can provide close to 30 kg of thrust. I saw it fly once and it was equally amazing and scary.
Mohonky
Member
How did you miss it? Because there are so few of us special kind of geeks into RC stuff so it gets pushed back a lot
Pixhawk is running arducopter is it not? Unless Im mistaken, I thought it was. I watched a few videos on arducopter and features like air braking and stuff like that and was very impressed. If you have the coding knowledge, I'm sure there is a lot of really cool stuff you could make these things do, one of them you mentioned, thrust vectoring. I havent heard of anyone implementing it themselves but being that so many of these controllers are open source, I can easily see how with the flexibility of the software someone could do it (as you guys did).
Im a little surprised actually that many frames use a static horizontal pitch, it actually becomes bit of a pain in the ass as any out of balance motors or props can cause a multirotor to want to yaw drift. One of the things I really like about my Reconn is that the motors are on a round boom and are all tilted at 5 degrees. It doesnt give any sort of thrust vectoring but it does give you greater yaw and if you do happen across any yaw drift, you can simply change the pitch of one of the motors to compensate. Every fixed arm frame makes me sort of cringe now because if you do have yaw drift, getting rid of it could be a nightmare as any number of things could be the cause.
Pixhawk is running arducopter is it not? Unless Im mistaken, I thought it was. I watched a few videos on arducopter and features like air braking and stuff like that and was very impressed. If you have the coding knowledge, I'm sure there is a lot of really cool stuff you could make these things do, one of them you mentioned, thrust vectoring. I havent heard of anyone implementing it themselves but being that so many of these controllers are open source, I can easily see how with the flexibility of the software someone could do it (as you guys did).
Im a little surprised actually that many frames use a static horizontal pitch, it actually becomes bit of a pain in the ass as any out of balance motors or props can cause a multirotor to want to yaw drift. One of the things I really like about my Reconn is that the motors are on a round boom and are all tilted at 5 degrees. It doesnt give any sort of thrust vectoring but it does give you greater yaw and if you do happen across any yaw drift, you can simply change the pitch of one of the motors to compensate. Every fixed arm frame makes me sort of cringe now because if you do have yaw drift, getting rid of it could be a nightmare as any number of things could be the cause.
How did you miss it? Because there are so few of us special kind of geeks into RC stuff so it gets pushed back a lot
Haha true
GAF is not nerdy enough it seems.Pixhawk is running arducopter is it not? Unless Im mistaken, I thought it was. I watched a few videos on arducopter and features like air braking and stuff like that and was very impressed. If you have the coding knowledge, I'm sure there is a lot of really cool stuff you could make these things do, one of them you mentioned, thrust vectoring. I havent heard of anyone implementing it themselves but being that so many of these controllers are open source, I can easily see how with the flexibility of the software someone could do it (as you guys did).
Yeah it's running arducopter (now renamed APM copter because it also runs on platforms other than Arduinos). It has a ton of features, support for plenty of sensors and some pretty good controllers. I was actually fairly impressed by their controllers and their sensor fusion. Some of the guys working on that really know their shit.
And yeah there's tons of modifications you can do since you have access to the entire source code. It's a bit of a mess though and it's not very well documented so even understanding the general structure of the code takes a while.
We did implement thrust vectoring (and so did the team that won the competition actually, although they used servos instead of fixed mounts which offers a wider range of adjustment but adds weight and reduces reliability because of the extra moving parts), it wasn't too complex from what I was told by the team member that did it.
Im a little surprised actually that many frames use a static horizontal pitch, it actually becomes bit of a pain in the ass as any out of balance motors or props can cause a multirotor to want to yaw drift. One of the things I really like about my Reconn is that the motors are on a round boom and are all tilted at 5 degrees. It doesnt give any sort of thrust vectoring but it does give you greater yaw and if you do happen across any yaw drift, you can simply change the pitch of one of the motors to compensate. Every fixed arm frame makes me sort of cringe now because if you do have yaw drift, getting rid of it could be a nightmare as any number of things could be the cause.
This is probably less of an issue on a multirotor that uses a compass (magnetometer) and runs a yaw controller. Even if there are slight imbalances a well tuned controller should be able to keep the heading pretty constant. But that has its limitations compasses don't really work that well indoors or close to metallic structures. And you can have coupling issues i.e. the pitch/roll and yaw controllers will fight against one another which can deteriorate performance. And yeah being able to easily fix that directly on the hardware is a godsend.
Mohonky
Member
Haha true
Yeah it's running arducopter (now renamed APM copter because it also runs on platforms other than Arduinos). It has a ton of features, support for plenty of sensors and some pretty good controllers. I was actually fairly impressed by their controllers and their sensor fusion. Some of the guys working on that really know their shit.
And yeah there's tons of modifications you can do since you have access to the entire source code. It's a bit of a mess though and it's not very well documented so even understanding the general structure of the code takes a while.
We did implement thrust vectoring (and so did the team that won the competition actually, although they used servos instead of fixed mounts which offers a wider range of adjustment but adds weight and reduces reliability because of the extra moving parts), it wasn't too complex from what I was told by the team member that did it.
This is probably less of an issue on a multirotor that uses a compass (magnetometer) and runs a yaw controller. Even if there are slight imbalances a well tuned controller should be able to keep the heading pretty constant. But that has its limitations compasses don't really work that well indoors or close to metallic structures. And you can have coupling issues i.e. the pitch/roll and yaw controllers will fight against one another which can deteriorate performance. And yeah being able to easily fix that directly on the hardware is a godsend.
When you say the thrust vectoring added weight, were you simply locking some props at a different pitch or using servos to rotate the boom and adjust pitch? The only way I could imagine it adding weight is if you used servo control for pitch?
As to the yaw drift, yeh that would be a non-issue for what you are doing and those flying autopilot, but when flying in agro, angle or horizon it unfortunately is a problem. My Reconn has full autonomous modes with gps, baro and compass sensors but I never use them as the multiwii software is just no where near as locked as apm, naza, wookong, ace etc for that sort of thing. I have tested RTH before and it was ok but I had my ass puckered the whole time watching it slowly do it's thing ready to jump in and take over in case it decided to suddenly play up.
I just got into quads over Thanksgiving weekend.
Bought a Estes Proto-Z for $15 on black Friday. Initially my thought was "this should be fun like my S107 heli" but damn I was not expecting these things to be such a blast. So I took the Proto to work and after a week, and over 5-8 flights a day, we ended up breaking one of the arms completely off. Immediately I went online to get a replacement and settled on the Syma X11 that showed up today:

Much better than the Proto overall... and now I've purchased a Emax 250 Kit.... I'm hooked!
Bought a Estes Proto-Z for $15 on black Friday. Initially my thought was "this should be fun like my S107 heli" but damn I was not expecting these things to be such a blast. So I took the Proto to work and after a week, and over 5-8 flights a day, we ended up breaking one of the arms completely off. Immediately I went online to get a replacement and settled on the Syma X11 that showed up today:
Much better than the Proto overall... and now I've purchased a Emax 250 Kit.... I'm hooked!
- Status
- Not open for further replies.